An Active Pose Estimation Framework for Robotic Assembly of Large-Scale Aircraft Components
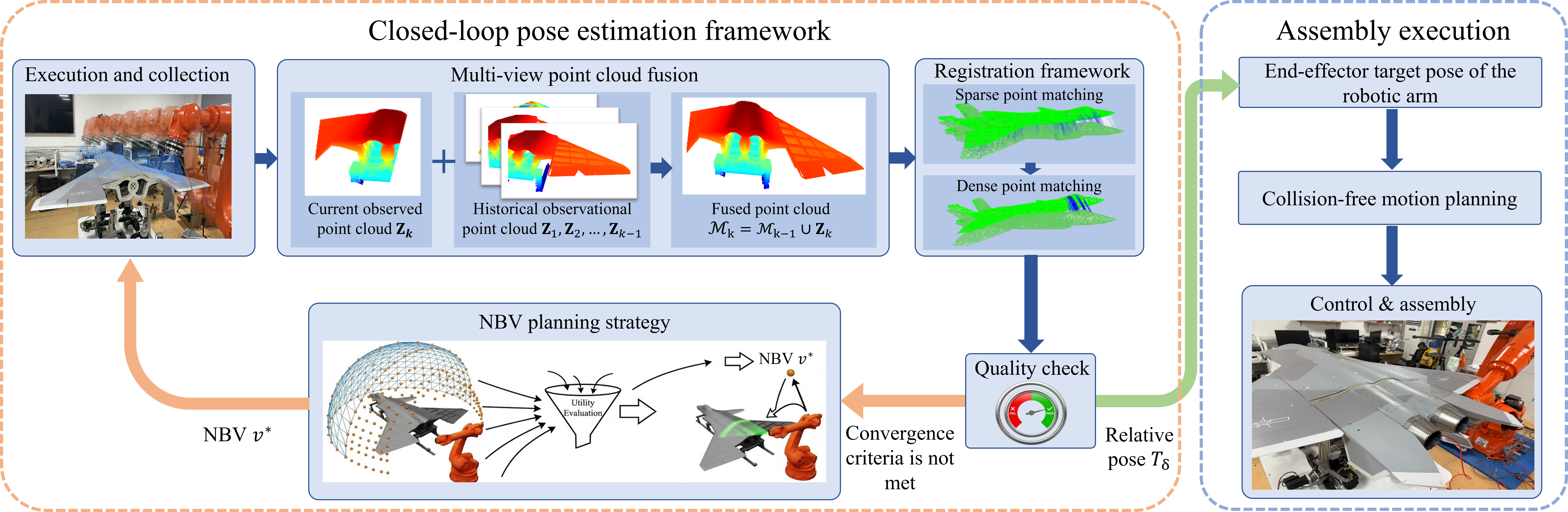
The schematic overview of the proposed closed-loop pose estimation framework and the robotic assembly execution. The workflow consists of two coordinated phases. (Left) In the closed-loop pose estimation phase, scanning, multi-view fusion, hierarchical registration, and NBV planning are performed iteratively to update the 6D pose estimate until a predefined stopping criterion is met. (Right) In the assembly execution phase, the estimated pose is passed to the motion planning and control modules for component alignment and docking.
Video
Abstract
Accurate pose estimation is essential for robotic docking assembly of large-scale aircraft components. Conventional passive approaches, such as exhaustive robotic scanning or reliance on external metrology systems, involve extensive data acquisition and processing, resulting in high computational cost, complex system deployment, and limited adaptability to dynamic assembly environments. This article presents a closed-loop active pose estimation method that integrates next-best-view (NBV) planning and hierarchical point cloud registration within a perception–action loop for robotic docking assembly. In the NBV planning stage, a geometric information gain–driven NBV strategy is formulated by jointly considering geometric stiffness, overlap consistency, and feature saliency, enabling the robot to autonomously select informative viewpoints for efficient data acquisition. In the point cloud registration stage, a sparse-to-dense hierarchical registration network is designed to achieve accurate alignment with reduced computational burden. The pose estimation process iterates in a closed-loop manner until predefined criteria on both alignment error and inlier fitness are satisfied. Experiments conducted on both simulated and real-world aircraft assembly platforms showcase the effectiveness of the proposed method on efficiency and accuracy compared to fixed-path and coverage-based methods. Ultimately, the proposed method achieves assembly success rates of 95% in simulation and 90% on the real-world platform, while maintaining reliable docking performance with a real-world gap error of 0.6 ± 0.2 mm. These results demonstrate the capability of the proposed method to enable high-precision and efficient robotic docking assembly in aircraft manufacturing.